第一作者:李逸洲
通訊作者:陳智明、羅堅義
背景介紹及內容概述
觸覺在信息獲取中起著重要的作用,即使沒有視覺,也可以通過觸覺獲取復雜的信息。為了模仿人類手指的觸覺感知,各種各樣的觸覺傳感器已經被開發出來并應用在生物機器人上,以獲取外界的信息。具有觸覺感知的生物機器人目前主要關注物體的表面信息,如形狀、表面紋理以及表面材料的剛度和柔軟度。配備觸覺傳感器的生物機器人可以模擬人類來感知物體的表面特征信息,但從材料中獲取表層下信息仍然具有挑戰性。目前對表層下信息的獲取主要還是來自于光學途徑,與人類視覺類似,光學CT可以在透明介質下識別具有不同光學特征參數的材料。然而,由于大多數介質的透過率較低,光學CT的實際應用存在一定的局限性。作為視覺的替代或補償,觸覺可以與生物機器人兼容,為獲取材料的表層下或內部信息提供另一種策略。

圖1 人類手指和仿生手指的觸覺感知機制
近日,五邑大學應用物理與材料學院、柔性傳感材料與器件研究開發中心陳智明博士、羅堅義教授團隊在一種具有觸覺斷層掃描功能的智能仿生手指研究方面取得重要進展。研究人員針對人類手指觸摸軟體材料這一過程特點,提出了一種配備力反饋系統的仿生手指,其具有獨特的觸覺斷層掃描能力。基于碳纖維束的橫向壓敏特性,制備出一種對力極其敏感的觸覺傳感器,并圍繞觸覺傳感器構建了一個手指模型,指尖用于傳感器獲取外界壓力信號。仿生手指基于觸覺反饋系統,可以定量地對力做出反應,使仿生手指能夠感知材料表層下的特征,例如表層下的形態和不同柔軟程度的內部物體。利用仿生手指重建了不同材料的切片圖像,證明了通過設置多個不同閾值可以實現次表面觸覺層析成像。這種基于碳纖維束和具備力反饋系統的仿生手指在軟體材料識別測試中具有很大的應用前景。這一原創性工作及其相關成果以“A smart bionic finger for subsurface tactile-tomography”為題發表于著名期刊Cell旗下物質科學子刊Cell Reports Physical Science上。

圖2 智能仿生手指觸覺反饋系統

圖3 仿生手指的觸覺感知 (A)、(C)具有表面周期性條紋的剛性和軟材料上掃描的仿生手指示意圖;(B)、(D)剛性和軟材料的三維深度圖和投影圖像;(E)在堅硬材料上掃描的仿生手指示意圖,上面覆蓋著一層柔軟的硅膠層,(F)覆蓋有軟硅層的剛性材料的三維深度圖和投影圖像(G)在剛性材料上掃描的仿生手指示意圖,該材料覆蓋了一層柔軟的硅膠層,并填充了四種不同比例的AB膠。(H)用柔軟的硅膠層覆蓋剛性材料,填充20:2、20:1.5、20:1.2四種不同比例AB膠的三維深度圖和投影圖像。
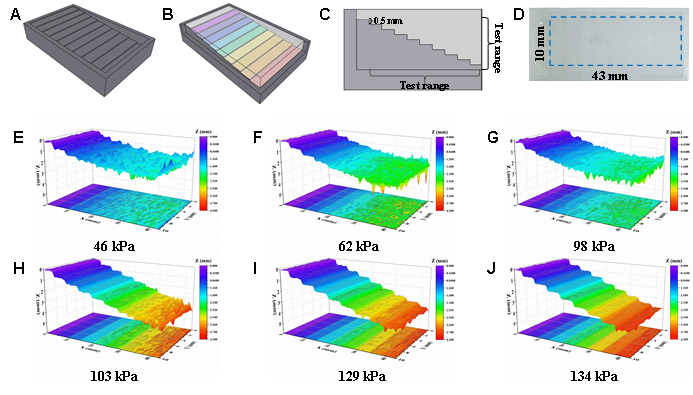
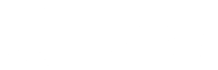
圖4 仿生手指的次表面觸覺斷層掃描 (A)具有下降階梯表面的剛性材料;(B)帶有軟硅膠層的降階剛性材料;(C)下降階梯物體剖面圖;(D)下行階梯材料掃描區域。(E - J)閾值為(E) 46, (F) 62, (G) 98, (H) 103, (I) 129, (J) 134 kPa時,仿生手指掃描降階材料的三維深度圖和投影圖像。

圖5 模擬人體皮膚表層下結構觸覺層析 (A)正交三層結構的模擬骨架;(B)用軟硅酮層覆蓋的模擬骨架;(C)被軟硅酮層覆蓋的模擬骨架剖面圖;(D)模擬人體掃描區域;(E, G, I)在閾值為(E) 46, (G) 62,或(I) 134 kPa時,仿生手指掃描模擬人體的三維深度圖和投影圖像;(F, H, J)閾值(F) 46, (H) 62, (J) 134 kPa下三維相對位置的深度分布。
圖6 封裝柔性電路系統的次表面觸覺層析 (A)柔性電路系統的制備過;(B)封裝柔性電路系統的三維深度圖和投影圖像;(C)三維深度圖的三層圖像。
總結與展望
該研究工作提出了一個具有表層下觸覺斷層掃描能力的智能仿生手指。這種仿生手指配備了一個集成的觸覺反饋系統,使仿生手指能夠對力作出定量的反應。為仿生手指設置一系列與力相對應的閾值,以產生一系列逐層的材料內部切片圖像,這些切片圖像可以揭示和再現具有柔軟表層的材料的內部結構。這種針對軟體材料表層下的觸覺掃描通過重建模擬人體組織和封裝的柔性電路系統表面下的三維輪廓進一步得到證明。這種具有表層下觸覺斷層掃描能力的仿生手指,為人體和柔性電子的無損檢測提供了新思路和新方法。
作者及團隊介紹
第一作者:李逸洲,男,五邑大學應用物理學院2020級材料與化工碩士研究生。
通訊作者:羅堅義,男,工學博士,教授,博士生導師,現任五邑大學應用物理與材料學院院長,五邑大學柔性傳感材料與器件研究開發中心主任(創始人),廣東省杰出青年基金獲得者,國家重點研發計劃智能傳感重點專項會評專家,南粵優秀教師, 江門市首屆 “僑鄉青年榜樣”,江門市優秀科技工作者,江門市“十佳教師”。主要研究領域包括:柔性傳感材料與器件應用(柔性觸覺傳感、溫度傳感、氣壓傳感和彎曲傳感等);納米功能材料合成;智能調光變色材料與器件。
通訊作者:陳智明,男,工學博士,講師,碩士生導師。2019年畢業于華南理工大學獲博士學位,工作以來一直從事柔性傳感器的材料開發、器件制備及其應用研究。
附文獻及DOI號:
A smart bionic finger for subsurface tactile-tomography.
DOI:10.1016/j.xcrp.2023.101257